【基本】直線のベクトル方程式
ここでは、ベクトルを使って直線を表す方法について見ていきます。
ベクトル方程式の導入
【基本】位置ベクトルでは、平面上の点とベクトルとをつなぐ「位置ベクトル」を見ました。点の位置ベクトルを考えることで、内分点や外分点、2直線の交点などを、ベクトルを使って表すことができるようになりました(参考:【基本】内分点と外分点の位置ベクトル)。
座標平面の世界では、点だけでなく、直線や円も、方程式を使って表しましたね。同じように、ベクトルの世界でも、直線や円を表していきましょう。
直線のベクトル方程式
直線は、通る点と傾きが分かっていれば、1本に決まります。そのため、通る点と傾きが与えられた状態で、直線を表す方法を考えてみましょう。
通る点を A とし、この位置ベクトルを $\vec{a}$ とおきます。また、傾きは $\vec{d}$ とおきます。傾きがわからないと直線が決まらないため、傾きは $\vec{0}$ ではないとしましょう。ちなみに、 $\vec{a}$ は $\vec{0}$ でも構いません。
さて、点 A を通り、 $\vec{d}$ に平行な直線上の点 P があったとして、この位置ベクトル $\vec{p}$ がどう表されるかを考えてみましょう。
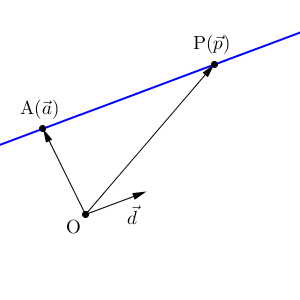
A と P が一致していないときは、 $\overrightarrow{ \mathrm{ AP } }$ と $\vec{d}$ は平行です。なので、【基本】ベクトルの平行で見たように、片方のベクトルを定数倍すれば、もう片方のベクトルになります。つまり、\[ \overrightarrow{ \mathrm{ AP } }=t\vec{d} \]となる実数 t が存在する、ということです。
A と P が一致している場合も、 $t=0$ とすれば、\[ \overrightarrow{ \mathrm{ AP } }=t\vec{d} \]が成り立ちますね。このことから、
\begin{eqnarray}
\overrightarrow{ \mathrm{ AP } } &=& t\vec{d} \\[5pt]
\vec{p}-\vec{a} &=& t\vec{d} \\[5pt]
\vec{p} &=& \vec{a}+t\vec{d} \\[5pt]
\end{eqnarray}が成り立ちます。直線上の点の位置ベクトルはこう書けるし、こう書ける点は直線上にあります。
この式を、この直線のベクトル方程式といいます。 t がいろいろな実数をとるように動けば、 $\vec{p}$ に対応する P は、 A を通り $\vec{d}$ に平行な直線の上を移動します。
この式の t を媒介変数といい、 $\vec{d}$ は方向ベクトルと言います。
ちなみに、直線の方程式は $y=mx+n$ でしたね。直線を考えるときに動くのは m, n ではなく、 x, y でした。 t が動いて直線を表すというのは、 m, n ではなく、 x, y が動いて直線を表すということに似ています。
tの値と直線のベクトル方程式
上の状況で、 t が変わることによって、直線上のどの点に対応するかを考えてみましょう。こうすることで、より理解が深まります。
まず、 $t=0$ の場合を考えましょう。このとき、 $\vec{p}=\vec{a}$ となるので、 P は A と一致します。
$t=1$ のときは、 $\vec{p}=\vec{a}+\vec{d}$ なので、 A から $\vec{d}$ だけ移動した点が P です。
同様に考えれば、 $t=2$ のときは、 $\vec{p}=\vec{a}+2\vec{d}$ なので、 A から $\vec{d}$ の方向に、先ほどの2倍移動した点が P です。
逆に $t=-1$ のときは、 $\vec{p}=\vec{a}-\vec{d}$ なので、 A から $\vec{d}$ と逆に移動した点が P です。
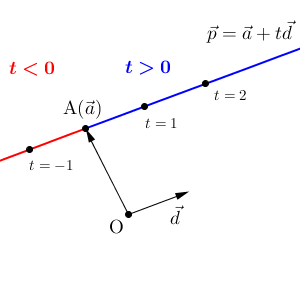
$t=0$ のときに P は A と一致し、 $t\gt 0$ のときは、 P は A から $\vec{d}$ と同じ方向の先にあり、 $t\lt 0$ のときは逆の方向の先にあります。また、 t の大きさと AP の長さは比例するので、絶対値が大きくなるほど遠くに行きます。
このように対応する、ということを頭に入れておきましょう。
おわりに
ここでは、直線のベクトル方程式について見てきました。通る一点の位置ベクトルと傾きから、ベクトル方程式を書くことができます。また、媒介変数の値によって、直線のどの点が表現されているかも理解しておきましょう。